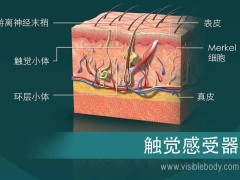
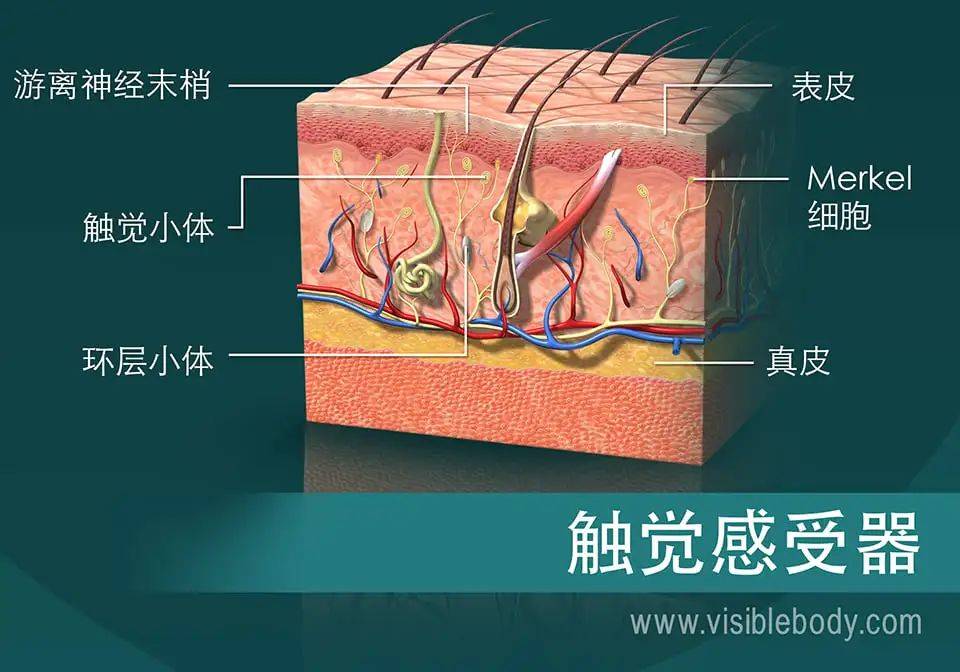
在探索机器人感知能力的边界上,一场静默而深刻的革命正在发生。想象一下,当你从冰箱中取出一枚鸡蛋时,指尖不仅能感受到它的椭圆形状和微妙重量,还能通过细腻的触感判断出表面的粗糙程度,这一切都在不经意间完成,无需过多思考。如今,这种人类与生俱来的精细触觉,正被机器人逐步掌握,而这一切的背后,离不开视触觉传感器的飞速发展。
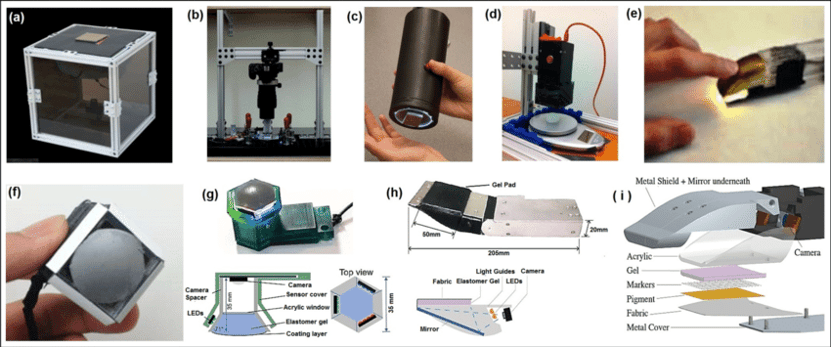
视触觉传感器,这一基于视觉原理的触觉感知装置,不同于传统的力传感器,它能够全方位捕捉法向力、剪切力、滑动以及物体姿态等多维度信息,几乎复刻了人手的触觉体验。其中,GelSight作为这一领域的佼佼者,自2009年由MIT的Edward Adelson团队提出以来,便以其独特的弹性凝胶表面和内置视觉系统,成为了研究热点。
GelSight的工作原理,仿佛是一个微缩的“触觉照相机”。当物体与传感器接触时,弹性凝胶会根据接触力的大小和方向发生形变,这些肉眼难以察觉的微小变化,在LED灯光和内置摄像头的配合下,被捕捉并转化为清晰的图像。通过深度学习算法的处理,这些图像能够进一步解析出接触表面的三维压力分布和精细纹理特征,甚至达到识别指纹或纸币浮雕的精度。
从实验室到实际应用,视触觉传感器的发展经历了从理论验证到实践应用的华丽转身。早期,MIT团队通过构建触觉纹理数据库,展示了传感器在材料识别方面的潜力。随后,与机械臂的集成应用,更是让机器人在精细操作上迈出了重要一步,如在插拔USB接口等高精度任务中,显著提高了成功率。
近年来,随着技术的不断迭代,视触觉传感器领域涌现出多种创新设计。英国布里斯托大学的TacTip传感器采用仿生设计,模拟人类指尖的触觉感受器;UC Berkeley的OmniTact则实现了弯曲表面的全方位感知。商业化产品如GelSight,也在不断精进,为机器人提供了前所未有的触觉智能。
然而,行业创新的步伐并未停止。面对专利壁垒和技术瓶颈,业界开始探索更加多元的技术路线。其中,基于单色光图案追踪的传感器,以其低算力需求、低发热量和高耐用性,成为一股不可忽视的力量。戴盟机器人便是这一路线的代表,其推出的DM-Tac W传感器,厚度仅为毫米级别,每平方厘米覆盖4万个感知单元,远超人手,已广泛应用于工业自动化、消费电子等领域。
视触觉传感技术的广泛应用,正在深刻改变着多个行业。在工业自动化领域,它使机器人能够轻柔处理易碎物品,执行精密装配;在医疗领域,手术机器人凭借触觉感知,能够更精确地分辨组织特性;在工业检测中,它能发现肉眼难以察觉的缺陷;在虚拟现实领域,它提供真实的触觉反馈,增强了用户的沉浸感。
尽管前景广阔,视触觉传感器行业仍面临诸多挑战。数据集的缺乏、算法的瓶颈、耐用性的提升以及功耗和成本的控制,都是亟待解决的问题。然而,随着材料科学、微电子技术和人工智能算法的持续进步,这些难题正逐一被攻克。
在资本市场的助力下,视触觉传感器行业正加速从实验室技术向大规模工业应用转化。国家对于高端制造和机器人产业的支持,更为这一领域提供了广阔的发展空间。随着技术的不断突破和成本的持续下降,视触觉传感器有望成为人机交互新时代的关键组件,开启一个更加智能、更加细腻的人机交互时代。